Atlas Developer Documentation
Deterministic Sensor Infrastructure for Robotics
Unify your IMU, GNSS, and LiDAR data with microsecond precision. Atlas is a high-throughput sensor gateway for deterministic robotics.
Atlas establishes a hardware time authority and sensor infrastructure layer for modern robotics systems.
Instead of wiring sensors directly into the robot compute platform, Atlas creates a dedicated integration layer that synchronizes sensors, aggregates data streams, and delivers a unified perception pipeline.
Atlas allows robotics teams to treat sensor integration as infrastructure, eliminating repeated custom integration work across robot platforms.
Designed for Real Robotics Systems
🚀 Time to Hello-World (ROS2 in Minutes)
Atlas integrates into your existing ROS2 stack in minutes.
Run two commands:
atlas_start
ros2 launch atlas_dsil_bridge telemetry.launch.py
What you will see
Within seconds, Atlas telemetry appears in ROS2:
/atlas/status→ system health/atlas/pps→ timing signal state/atlas/sync_drift→ real-time synchronization error
What this means
Before Atlas
• Independent sensor clocks
• Unpredictable timing offsets
• Difficult debugging
With Atlas
• Unified hardware time base
• Deterministic sensor alignment
• Observable synchronization state
No integration risk
- No driver changes required
- No sensor firmware modification
- Works with your existing ROS2 stack
Core Capabilities of Atlas
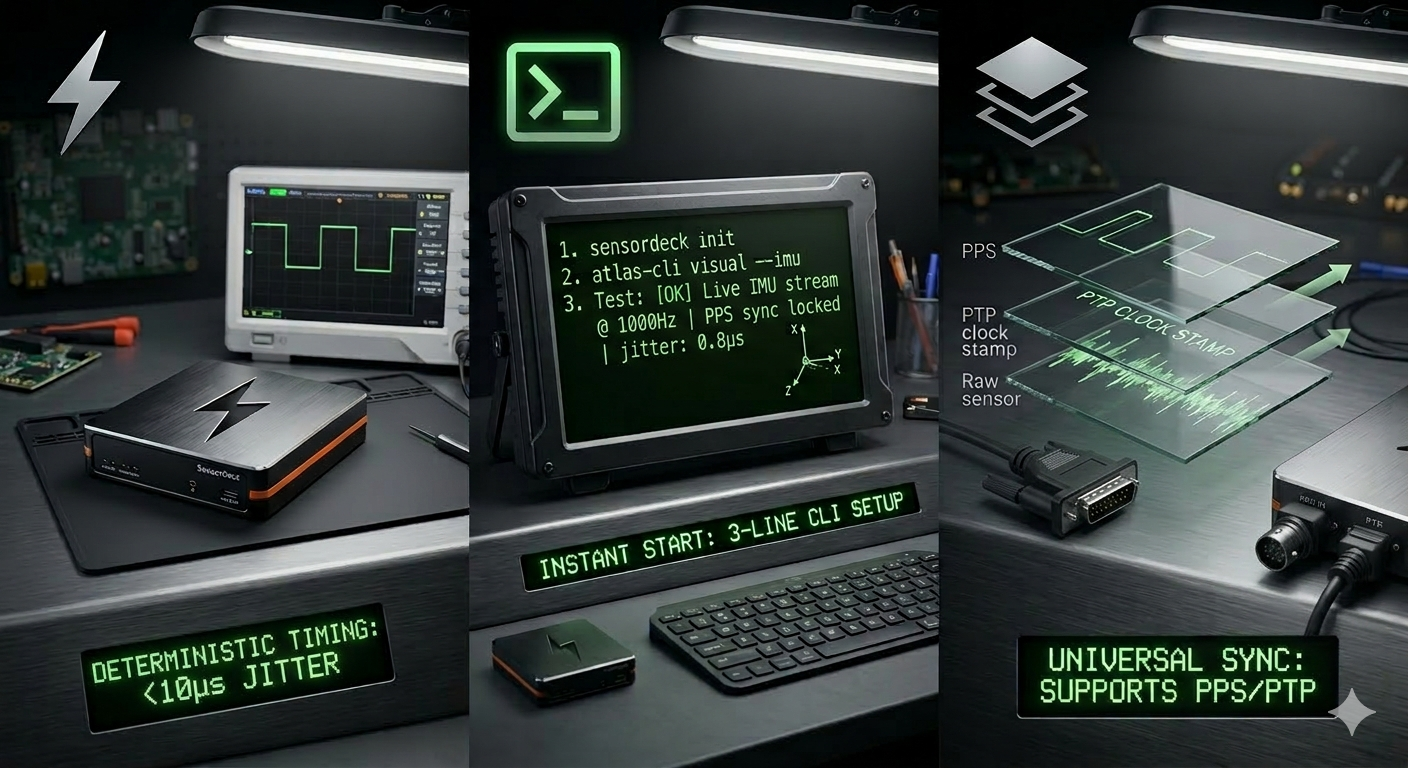
1. Time Authority
Atlas establishes a single hardware time authority across all connected sensors, ensuring consistent and deterministic timestamping for the entire perception stack.
2. Unified Sensor Integration
Atlas consolidates heterogeneous sensor interfaces and power delivery into a single structured integration layer, reducing wiring complexity and eliminating fragmented power architectures.
3. System Observability & Synchronization
Atlas exposes timing relationships, synchronization state, and sensor health through a unified telemetry layer, enabling full system observability and deterministic data alignment in ROS2 environments.
4. Cross-SKU Infrastructure
Atlas provides a reusable sensor infrastructure layer that scales across robot platforms and product SKUs, eliminating repeated integration work and enabling faster product development cycles.
Atlas Architecture
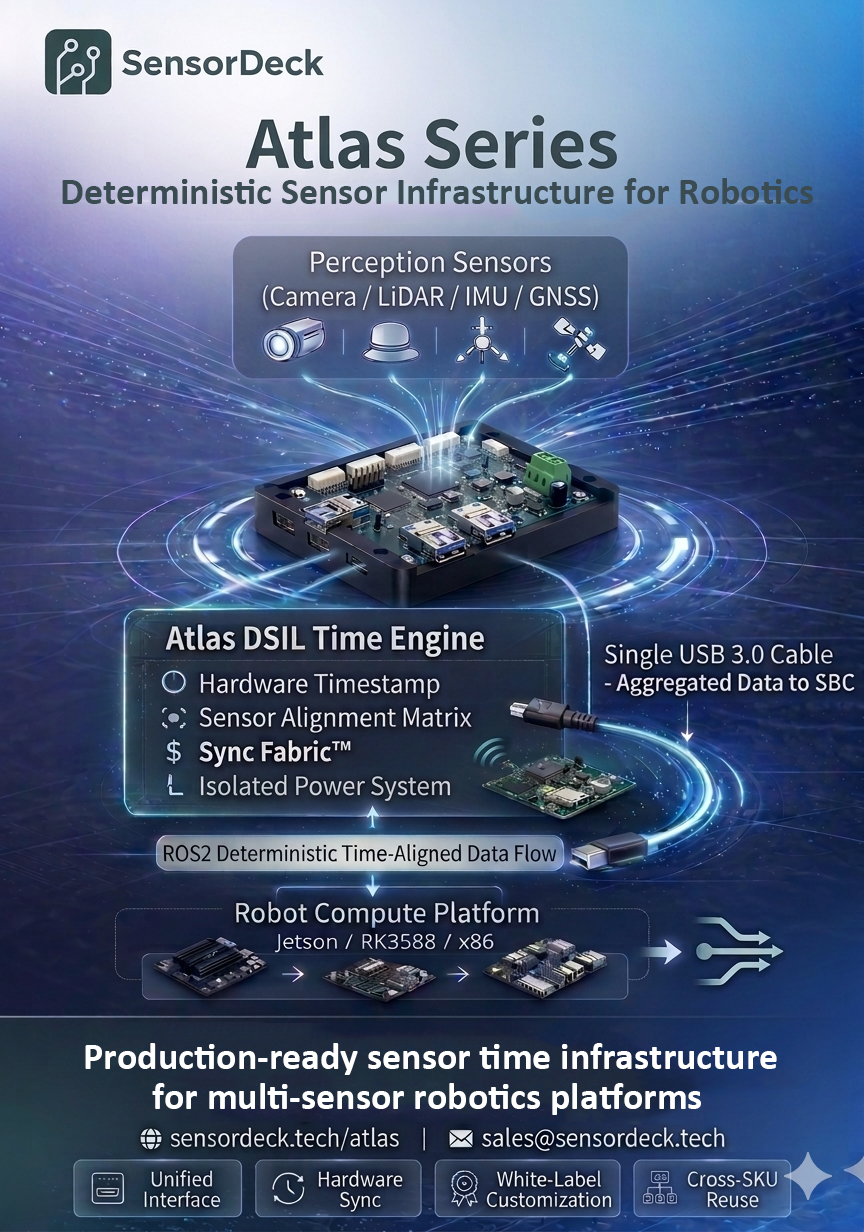
Atlas sits between the sensor domain and the robot compute platform.
Sensors connect to Atlas → Atlas synchronizes and aggregates them → the robot compute platform receives a time-aligned, unified perception pipeline.
Getting Started with Atlas
Atlas documentation is structured as a step-by-step system.
To fully understand how Atlas works and how to integrate it into your robotics platform, we recommend following this sequence:
1. Sensor Synchronization
Understand the core problem Atlas solves.
Learn why independent sensor timestamps lead to inconsistent perception, SLAM instability, and difficult debugging.
👉 Defines the problem space
2. Hardware Architecture
See how Atlas solves synchronization at the physical level.
Atlas establishes a sensor domain boundary that unifies timing, power, and connectivity across all sensors.
👉 Defines the system architecture
3. DSIL SDK
Understand how Atlas hardware becomes usable in software.
DSIL converts hardware timing into synchronized ROS2 timestamps, structured telemetry, and system observability.
👉 Defines the infrastructure layer
4. ROS2 Integration
Deploy Atlas into your existing robotics stack.
Atlas integrates without modifying drivers or pipelines, enabling immediate adoption.
👉 Defines the integration model
What You Gain
By following this architecture, Atlas transforms sensor integration from:
custom engineering work → deployable infrastructure
- deterministic sensor timing
- unified sensor interface
- reduced integration complexity
- improved system observability
Next Step
The best way to understand Atlas is to evaluate it in your own system.
👉 Request the Atlas Evaluation Kit
Integration Resources
Atlas provides additional materials for evaluation and deployment: